

















































































































































¿Necesita equipar o completar la electrónica de a bordo?
Encuentre instrumentos, cables y accesorios adaptados a su instalación marina.
Una sonda para barco es un dispositivo que utiliza impulsos sonoros para medir la profundidad e interpretar lo que se encuentra debajo o alrededor del casco. La calidad de la lectura depende tanto del transductor como de los ajustes, la velocidad del barco y la instalación. Las tecnologías 2D, CHIRP, barrido vertical y barrido lateral no muestran la misma información. Una lectura fiable empieza con una señal limpia, un transductor bien colocado y ajustes adaptados a la profundidad.
¿Qué es una sonda para barco y para qué sirve?
Una sonda para barco sirve para medir la profundidad, visualizar el fondo y detectar ciertos elementos presentes en el agua, como peces, praderas marinas, rocas o cambios de relieve. Ayuda tanto a navegar con más tranquilidad como a comprender mejor la zona por la que se mueve. En una lógica más amplia, también forma parte del funcionamiento general de un barco.
A menudo se confunden tres términos: sonda, transductor y sonar. La sonda es la pantalla o unidad que interpreta y muestra la información. El transductor es la pieza que emite y recibe las ondas en el agua. El sonar designa el principio general: enviar una onda sonora y analizar su retorno.
¿Para qué sirve la unidad?
La unidad transforma las señales recibidas en una imagen legible: profundidad, línea de fondo, intensidad de los ecos, colores, arcos o estructuras.
¿Para qué sirve el transductor?
El transductor es el elemento decisivo para la calidad de la señal. Un transductor mal colocado puede dar una imagen inestable, incluso con una buena pantalla.
¿Para qué sirve el sonar?
El sonar permite “leer” bajo el agua sin visibilidad directa. Se basa en el análisis del tiempo de retorno y de la fuerza de los ecos.
¿Cómo funciona una sonda para barco mediante el principio de los ecos?
El funcionamiento de una sonda para barco se basa en una lógica sencilla: el transductor envía una impulsión sonora al agua y el aparato mide el tiempo necesario para que vuelva el eco. A partir de ese tiempo de retorno, calcula la distancia entre el transductor y el fondo o el objeto detectado.
¿Cómo se envía la impulsión?
El transductor emite ultrasonidos en un haz más o menos amplio. Este haz puede ser cónico en 2D o más fino según las tecnologías de imagen.
¿Por qué vuelve el eco?
La onda encuentra un obstáculo: fondo, roca, pradera marina, pez, burbuja o capa de temperatura. Una parte de la energía vuelve hacia el transductor.
¿Cómo se calcula la profundidad?
El aparato mide el recorrido de ida y vuelta de la señal y divide la distancia por dos. También puede aplicar un offset para mostrar la profundidad bajo el transductor o bajo la quilla.
La intensidad del retorno es tan importante como la distancia. Un eco potente suele indicar un fondo duro o una estructura densa. Un retorno más débil puede corresponder a fango, arena suelta, vegetación o una señal atenuada.
¿Por qué se desplaza la pantalla de una sonda para barco?
La pantalla de una sonda para barco generalmente no muestra una foto fija del fondo. Muestra un histórico: la parte derecha corresponde a la información más reciente y los datos se desplazan progresivamente hacia la izquierda.
Esta lógica explica por qué una misma estructura puede parecer estirada o comprimida según su velocidad, la velocidad de desplazamiento y la profundidad. En parado, la sonda sigue emitiendo: no ve un mapa inmóvil, sino una sucesión de ecos tomados en el mismo lugar.
Leer una sonda exige relacionar la imagen con la situación real: velocidad del barco, profundidad, modo elegido, anchura del haz y estabilidad del transductor. Esto permite diferenciar una información útil de una simple interferencia.
¿Qué diferencias hay entre sonda 2D, CHIRP, barrido vertical y barrido lateral?
Las tecnologías de una sonda para barco no muestran todas lo mismo. El 2D sirve para seguir lo que ocurre bajo el casco, el CHIRP mejora la separación de los ecos, el barrido vertical detalla la estructura bajo el barco y el barrido lateral sirve para prospectar a los lados.
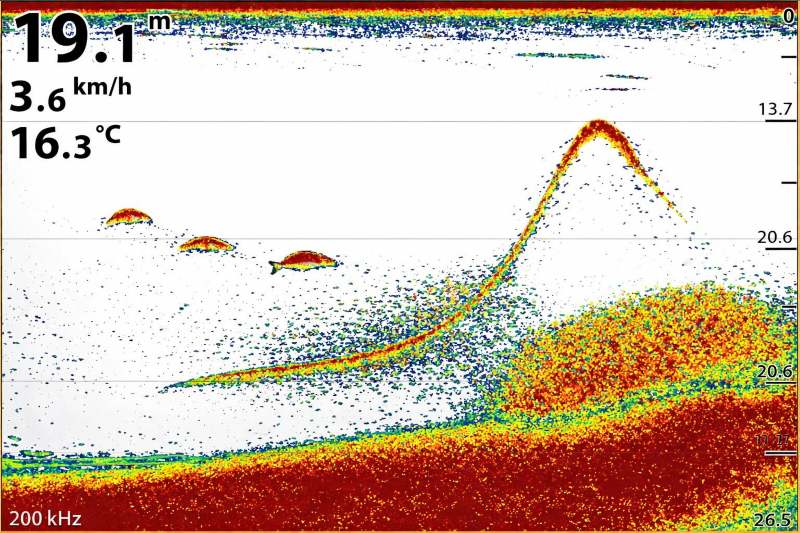
En 2D, la pantalla se desplaza: se lee un histórico, no una foto instantánea.
¿Cuándo usar la sonda 2D?
El 2D es el modo más polivalente. Sirve para seguir la profundidad, leer el fondo, detectar arcos y mantener una lectura eficaz en navegación o pesca general.
¿Qué cambia el CHIRP?
El CHIRP utiliza una gama de frecuencias en lugar de una frecuencia única. A menudo mejora la legibilidad y ayuda a separar ecos cercanos, por ejemplo un pez cerca del fondo.
¿Para qué sirve el barrido vertical?
El barrido vertical ofrece una imagen más detallada bajo el barco. Es útil para distinguir rocas, cambios de relieve, pecios, praderas marinas o relieves en poca o media profundidad.

El barrido vertical destaca la estructura bajo el barco con una lectura más fina.
¿Por qué elegir el barrido lateral?
El barrido lateral permite escanear los lados del barco. Cubre una zona más amplia que el 2D y resulta valioso para prospectar: localizar un pecio, un desnivel, una zona rocosa o una estructura situada fuera del eje del casco. Las sombras mostradas son importantes porque dan una indicación del relieve.
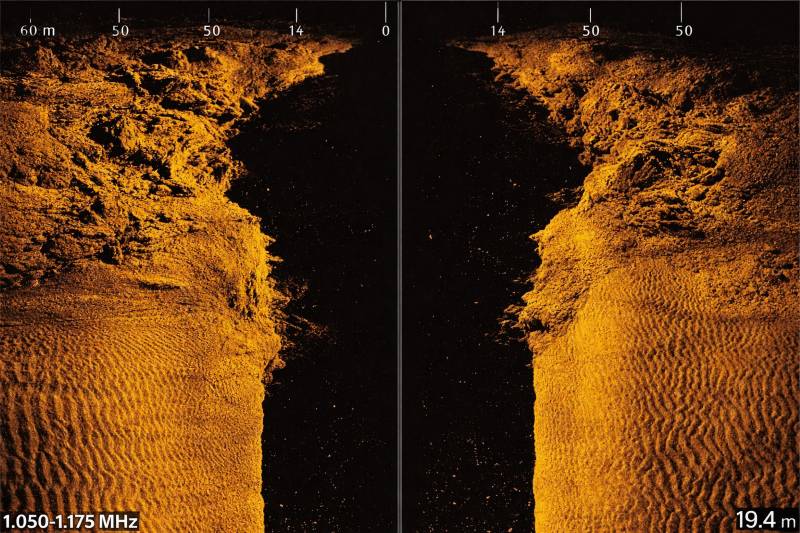
El lateral sirve para prospectar: se identifica la estructura y su sombra para estimar el relieve.
¿Está preparando una instalación electrónica completa?
Piense también en los cables, la conectividad y la coherencia de la red de a bordo.
¿Qué parámetros influyen realmente en la lectura de una sonda para barco?
La lectura de una sonda para barco depende sobre todo de la frecuencia, la potencia, el ángulo del haz y la calidad de la señal recibida. Dos aparatos pueden mostrar una imagen muy distinta en el mismo lugar si sus transductores o ajustes no son comparables.
¿Por qué importa la frecuencia?
Las frecuencias bajas llegan mejor en profundidad, pero ofrecen menos detalle. Las frecuencias altas muestran mejor las estructuras, pero su alcance es más limitado.
¿Por qué importa la potencia?
La potencia ayuda a mantener una lectura estable en profundidad, en agua agitada o cargada. Sin embargo, demasiada potencia puede amplificar el ruido si el filtrado está mal ajustado.
¿Por qué importa el ángulo del haz?
Un haz amplio cubre más superficie, mientras que un haz estrecho apunta con más precisión. La elección correcta depende de la profundidad y del nivel de detalle buscado.
¿Cómo leer una sonda para barco sin confundir peces, fondo e interferencias?
Leer una sonda para barco consiste en reconocer firmas visuales. Los peces, bancos, fondos duros, fondos blandos, burbujas y ciertas capas de agua no producen los mismos retornos.
¿Por qué un pez forma un arco?
El arco aparece cuando el pez atraviesa el haz. Entra en la zona de detección, pasa cerca del centro y sale. Según la velocidad y el ajuste, el arco puede convertirse en una simple línea.
¿Cómo reconocer un banco?
Un banco compacto suele parecer una masa densa o nubosa. Su forma depende de la compacidad del grupo, de la profundidad y de la sensibilidad ajustada.
¿Cómo distinguir un fondo duro?
Un fondo duro devuelve un eco más marcado, con una línea de fondo más gruesa o intensa. Un fondo blando suele devolver una señal más débil.
¿Cuáles son las falsas señales más frecuentes?
Las burbujas, el plancton, una termoclina o un agua muy cargada pueden crear retornos parásitos. Si la pantalla se vuelve nevada, empiece por ajustar la sensibilidad, el alcance y los filtros antes de concluir que hay peces.
¿Qué ajustes usar en una sonda para barco según las condiciones?
El buen ajuste es el que ofrece un fondo legible, ecos explotables y un nivel de ruido aceptable. Por tanto, hay que ajustar el alcance, la sensibilidad, la frecuencia y la velocidad de desplazamiento según la profundidad y el uso.
¿Qué ajustes en puerto o poca profundidad?
Mantenga un alcance automático o ligeramente superior a la profundidad real, una sensibilidad moderada y un desplazamiento medio. Piense en el offset si desea mostrar la profundidad bajo quilla.
¿Qué ajustes para pesca costera?
Entre 10 y 60 m, conviene combinar a menudo 2D e imagen vertical si el aparato lo permite. Suba la sensibilidad hasta obtener una imagen viva y después reduzca ligeramente.
¿Qué ajustes en profundidad o mar formada?
Priorice una frecuencia adaptada a la profundidad y una potencia suficiente. Si la señal desaparece en navegación, revise primero el transductor antes de culpar a los ajustes.
Los errores más comunes son una sensibilidad demasiado alta, un alcance demasiado grande, una velocidad de desplazamiento incoherente o un transductor expuesto a turbulencias. Una sonda bien ajustada nunca compensa totalmente una mala instalación.
¿Dónde instalar el transductor de una sonda para barco para mantener una señal limpia?
El transductor debe colocarse en una zona donde el agua permanezca lo más limpia posible durante la navegación. Las burbujas, turbulencias, cavitación, salidas de agua, redanes del casco o la proximidad de la hélice pueden perturbar fuertemente la señal. Para entender mejor la influencia de la propulsión en el flujo de agua, también puede consultar nuestra guía sobre el funcionamiento de una hélice de barco.
Para elegir mejor la zona de instalación, conviene identificar los elementos del casco y los volúmenes submarinos. Puede apoyarse en nuestra guía dedicada a la anatomía de un barco para situar mejor el espejo de popa, la quilla, los redanes y los apéndices.
¿Cuándo elegir un transductor de espejo de popa?
Es frecuente en barcos a motor y semirrígidas. Sigue siendo accesible y ajustable, pero puede ser sensible a las turbulencias a velocidad sostenida.
¿Cuándo elegir un transductor pasacascos?
Requiere una instalación más técnica, pero suele ofrecer una señal más estable. Conviene para montajes donde prima la fiabilidad.
¿Cuándo elegir un transductor interior?
Evita perforar algunas carenas de poliéster compatibles. El transductor queda protegido, pero el rendimiento depende mucho del casco y del pegado.
Antes de la fijación definitiva, pruebe la ubicación si es posible. Cuide también el paso del cable: sin pinzamientos, sin rozamientos y sin proximidad excesiva a fuentes de interferencias eléctricas.
¿Cómo evitar problemas de cableado, alimentación e interferencias?
Una sonda para barco necesita una alimentación estable y un cableado limpio. Una caída de tensión, una conexión oxidada o un cable mal protegido pueden provocar reinicios, cortes de pantalla o una imagen inestable. Para limitar estos problemas, conviene saber gestionar la energía a bordo.
La base consiste en utilizar una alimentación protegida por un fusible adecuado, conectores en buen estado y un recorrido de cable alejado de fuentes de interferencias. Para comprender toda la red de a bordo, puede completar con nuestra guía sobre el funcionamiento de la electricidad en un barco, nuestro artículo sobre el mantenimiento de una batería de barco y nuestra guía para elegir la batería de un barco.
Si combina GPS, sonda, AIS, VHF e instrumentos, la red NMEA permite compartir ciertos datos entre aparatos. En ese caso, la lógica de instalación se vuelve esencial: conectividad adecuada, cables coherentes y pruebas en el muelle antes de cerrar los paneles. El tema enlaza directamente con las guías DAM Marine sobre la tecnología AIS, el funcionamiento de una radio VHF marina y los instrumentos de navegación de un barco.
Por último, si el barco permanece mucho tiempo sin utilizarse, proteja la electrónica, los conectores y el transductor de la humedad, la sal y los golpes. Las buenas prácticas deinvernaje del barco limitan las malas sorpresas al reanudar la temporada.
¿Cómo elegir una sonda para barco adaptada a su uso?
Elegir una sonda para barco implica definir lo que desea leer: profundidad simple, pesca costera, prospección de estructuras, navegación regular o instalación conectada con varios instrumentos. El aparato adecuado también depende del transductor compatible y de la calidad de instalación posible en su casco.
¿Para una lectura simple de profundidad?
Una pantalla clara, un transductor fiable y una instalación limpia suelen ser suficientes. La prioridad es la legibilidad y la estabilidad de la señal.
¿Para pesca polivalente?
Un conjunto 2D + CHIRP ofrece una base muy eficaz. Añadir barrido vertical mejora la lectura de las estructuras bajo el barco.
¿Para prospectar grandes zonas?
El barrido lateral resulta interesante porque permite escanear los lados y detectar relieves u obstáculos alejados del eje del barco.
¿Qué tabla recordar antes de elegir o ajustar su sonda para barco?
La tabla siguiente resume los grandes modos de lectura y sus usos más frecuentes.
| Modo o elemento | Lo que ve | Punto fuerte | Límite principal | Uso recomendado |
|---|---|---|---|---|
| 2D | Perfil bajo el barco con histórico desplazado | Lectura polivalente del fondo y de los ecos | Menos visual en estructuras finas | Navegación, pesca general, seguimiento de profundidad |
| CHIRP | Imagen 2D más legible con mejor separación | Ecos cercanos mejor diferenciados | Depende de la compatibilidad transductor/aparato | Pesca en estructura, lectura precisa, bancos compactos |
| Barrido vertical | Estructura bajo el barco más detallada | Relieves, praderas, rocas y pecios más legibles | Menos pertinente en gran profundidad | Prospección en poca a media profundidad |
| Barrido lateral | Escaneo a izquierda y derecha con sombras | Gran anchura de prospección | Lectura sensible a la velocidad y a los ajustes | Búsqueda de pecios, rocas, desniveles, obstáculos |
| Instalación del transductor | Calidad y estabilidad de la señal | Determina en gran medida la fiabilidad de la imagen | Las turbulencias pueden degradar toda la lectura | Revisar antes de culpar a la pantalla o los ajustes |
| Alimentación y red | Estabilidad eléctrica e intercambio de datos | Instalación más fiable y evolutiva | Requiere un cableado limpio y protegido | Sonda, GPS, AIS, VHF, instrumentos conectados |
Preguntas frecuentes complementarias sobre la sonda para barco
¿Es útil una sonda para barco si no pesco?
Sí. Incluso sin practicar pesca, una sonda ayuda a vigilar la profundidad, identificar un cambio de relieve, evitar una zona demasiado somera y elegir un fondeo más adecuado. Para completar esta preparación, consulte también nuestras técnicas de fondeo.
¿Por qué mi sonda pierde el fondo cuando acelero?
La causa más frecuente es un transductor perturbado por burbujas o turbulencias. Revise la ubicación, la alineación y la altura del transductor antes de modificar todos los ajustes.
¿Qué tecnología priorizar para empezar?
El 2D con CHIRP constituye una base muy polivalente. Sigue siendo legible, útil en navegación y suficiente para comprender progresivamente los retornos del fondo y de los peces.
¿El barrido lateral sustituye a la sonda 2D?
No. El lateral sirve sobre todo para prospectar ampliamente a los lados. El 2D sigue siendo muy útil para seguir con precisión lo que se encuentra bajo el barco y conservar una lectura directa de la profundidad.
¿Hay que cortar la alimentación de la sonda durante el invernaje?
Es preferible asegurar la instalación, proteger los conectores y limitar la humedad. Según su montaje, se recomienda un corte limpio de la alimentación y una revisión de los cables antes de la puesta en marcha.